
RadarIQ
RadarIQ-M1 VISION Sensor
RadarIQ-M1 VISION Sensor
Couldn't load pickup availability
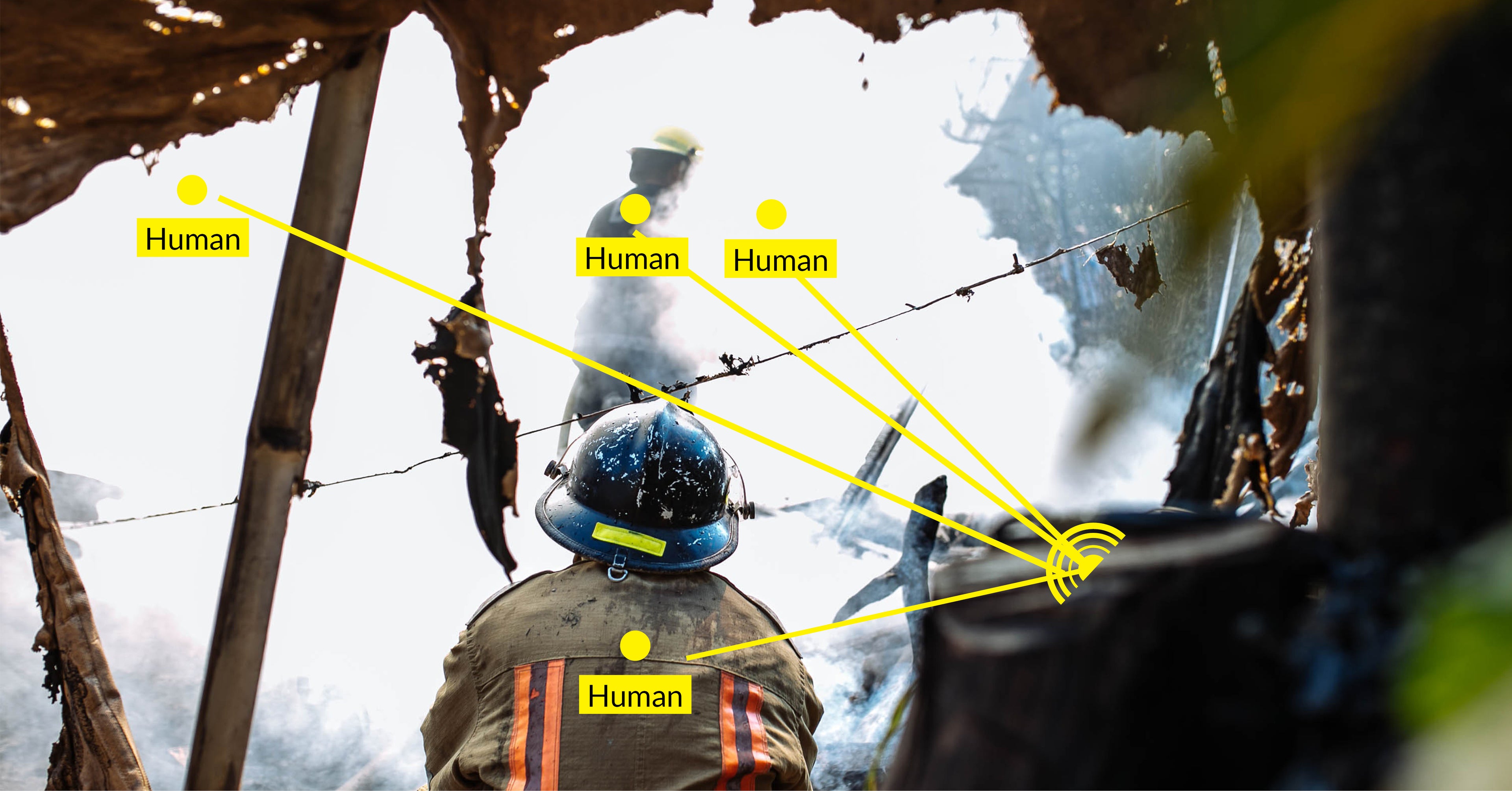
Radar-based sensor for accurately detecting objects in 3D space. This sensor uses the latest in 60GHz FMCW radar technology to detect multiple objects simultaneously. The sensor measures the X, Y, and Z coordinates of objects as well as their instantaneous velocity. The sensor can see through materials such as plastic, glass, or drywall making it easy to conceal.


RadarIQ-M1 Sensor Features
Highlights
- 60GHz FMCW radar.
- Measure the position and velocity of multiple objects similtaneously.
- Adjustable field of view.
- Easy setup and configuration of range, sensitivity.
- Two applications: Point Cloud detection and Object Tracking.
- Sensing functions are immune to wind, fog, steam, and temperature changes and resistant to rain and snow.
- Scene calibration allows for background objects to be removed from the sensors view.
- USB or UART connection makes it easy to use on popular platforms.
- SDK and sample applications provided.
Key Applications
- Robotics (Robotic Vision)
Radar vision adds robustness to robotic systems which require vision capabilities. While radar vision give nowhere near as much detail as a camera, it is hyper reliable and will work in any environmental conditions. Radar vision also gives distance and velocity information which is hard to get from a camera solution. - Sensor Fusion
Sensor fusion is the combining of multiple sensor sources. Sensor fusion is required when information from one sensor is not sufficient to make important decisions. Typically data from cameras and radar are used together to provide the high resolution visual information from a camera along with the distance and velocity information from a radar sensor. The other common use for sensor fusion is to provide backup in the case that the camera is not working (such as when it is dark).
The RadarIQ-M1 sensor has a 110 degree field of view and can detect at distances up to 10m making it ideal for sensor fusion. - Object detection and avoidance
Preventing collisions in autonomous or semi-autonomous systems is really important in all sorts of situations, from drones to fruit picking robots, forklifts to farm vehicles. Radar can detect multiple objects simultaneously and determine their trajectory and velocity to enable smart object detection systems to be created. - Presence detection
Knowing when there is someone or something in a specific location is a basic, but important sensing capability. Presence detection can be used in surveillance applications to know when there is unexpected movement in an area. It also has uses in smart facilities management to know when people are in particular areas of building, or in safety applications to enable/disable equipment when there are people or obstacles which are in close proximity. - Tracking
Tracking the movement of a person or object in space opens up a range of new possibilities. From understanding the movement of vehicles in a traffic management situation through to understanding paths people walk, or to even allow autonomous vehicles to follow a lead vehicle without being tethered. The possibilities are limitless.Robots designed to work in a mapped environment which need to also detect moving obstacles (such as people) reliably. - Agritech robots which need robust obstacle collision abilities, and can work under all lighting conditions.
Specifications
Radar type: FMCW
Frequency: 60-64GHz
Communications Protocol: UART
Radome: Flat
Beam Patten: 110 degrees Azimuth and 15 degrees Elevation
Field of View: Software adjustable up to 110 degrees
Dimensions: 55mm x 55mm x 10mm
Connector: USB micro to USB-A and USB micro to fly lead
Voltage: 3.8-5V
Current: 380 - 500mA
Frame Rate: 0-20 fps
Distance Range: 40mm – 10,000mm
Radial Velocity Range Range: 0-3m/s
Radial Velocity Resolution: 0.4m/s
Distance Resolution: 40mm
Enclosure Style: Cylindrical 50mm
Mounting: 50mm thread
Certification: CE, FCC Pending
Supported SDK languages: C/C++, Python, API documentation available for integration with other languages
Supported Platforms:
- Windows
- MacOS
- Linux
- ROS 1 & 2
- Arduino
- Raspberry Pi
Features
- A distance range of up to 10m.
- A 110-degree field of view in the azimuth direction and 15-degree field of view in the elevation direction which is amongst the widest field of view of any FMCW product on the market.
- An adjustable field of view (FOV) which means the sensor can be configured to focus on just the area of interest.
- Adjustable distance and height filters allow the sensor to be tuned to just the area of interest.
- Instantaneous doppler and radial velocity is available. Radar is one of the few technologies that can accurately measure velocity.
- The small 40mm dead zone is much smaller than for most other types of sensor such as ultrasonics.
- The scene calibrate feature allows data to be effortlessly cleaned up to remove any interferences from enclosures and other nearby equipment.
- Inherent robustness allows the sensor to continue to work where other sensors struggle/fail such as harsh lighting conditions.
- Works great combined with traditional vision sensors (cameras) to provide confluence of detections where a high-degree of certainty is needed. Being robust to environmental conditions means the sensor continues to work where traditional vision systems fail.
- The Controller application is available for Windows, Linux, and MacOS allowing an easy way to visualize the RadarIQ data.
- The build-in sensitivity filter allows the sensor to easily be tuned using just one knob, saving much post-processing of data.
- The ‘remove static objects’ filter allows the sensor to focus just on movement and to ignore anything in the background.
- The point density filter applies an aggregation filter to allow the sensor to produce higher quality results.
- Raw point cloud data can be exported for custom analysis.
- The see-through-walls-ability allows the sensor to be concealed which is great from a security perspective and also allows seeing through enclosures, making it possible to hide the sensor from view without affecting performance.
- Easy to use and is designed to allow to beginners to get started with the sensor in 15 min or less without needing to learn the complexities of radar mathematics.
Documentation and Resources
More Information
If you are not sure if the RadarIQ-M1 sensor is right for your application or need to discuss bulk pricing, contact us at sales@radariq.io
Accessories
The following accessories are available for the RadarIQ M1 Sensor: